

Study of redundant kinematics for industrial manipulators: case study of the 7 axes robot
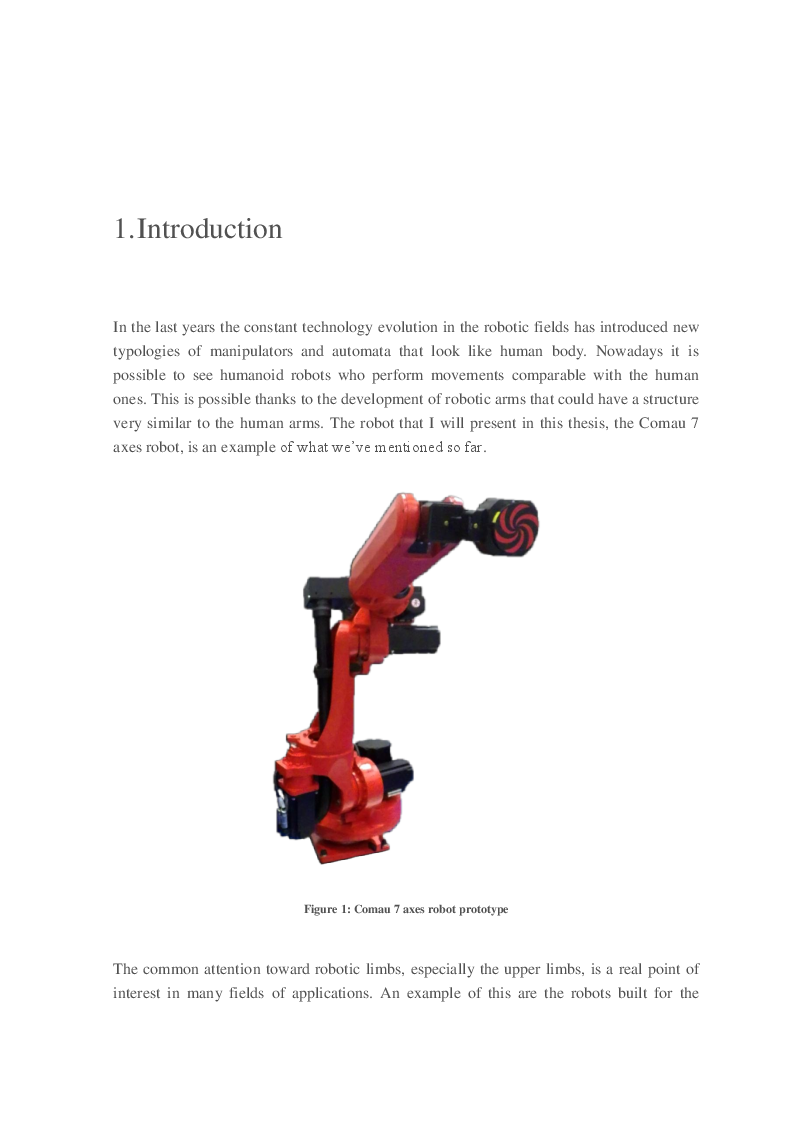
The objective of this Master thesis is the managing, the development and the integration of the Comau 7 axes robot prototype in the pre-existent system software. In particular this prototype is the first redundant anthropomorphic robot, with 7 axes, for Comau.
Redundant robots have a lot of advantages compared to standard anthropomorphic robot with 6 axes and six degrees of freedom. For example these can claim a better dexterity combined with an enhanced flexibility.
On the other hand there are a lot of difficulties and problems that we have to face in order to reach our goals. First of all the methodology used to program a classical anthropomorphic robot is not completely suitable for a redundant one. A new typology and philosophy of programming has to be proposed. Moreover there are a lot of issues deriving from mathematical problems. For example, to solve the inverse kinematics (algorithm which determines the joint values that provide a desired position of the end-effector) we have to face the fact that at each position in the space, corresponds an infinite number of possible joints solutions; one of this solutions has to be selected and a method of selection has to be chosen. The classical 6 axes inverse kinematics algorithm has been suitably extended to redundant manipulators by adopting a task space augmentation technique. Formally, a functional constraint task, is imposed to be satisfied together with the end-effector task; typical constraints include obstacle avoidance, limited joints range and singularity avoidance.
First, in this thesis we will talk about the organization of the overall project development, and the advantages and disadvantages of this robot typology.
Then, will be address an analysis of the redundant robots that our competitors offer on their catalogues. We will face all the mathematical issues, as well as, the integration of this kind of robot in the pre-existent software. Finally the actual development results will be presented together to next possible steps.
CONSULTA INTEGRALMENTE QUESTA TESI
La consultazione è esclusivamente in formato digitale .PDF
Acquista
CONSULTA INTEGRALMENTE QUESTA TESI
La consultazione è esclusivamente in formato digitale .PDF
Acquista

L'unico servizio antiplagio competitivo nel prezzo che garantisce l'aiuto della nostra redazione nel controllo dei risultati.
Analisi sicura e anonima al 100%!
Ottieni un Certificato Antiplagio dopo la valutazione.
Informazioni tesi
| Autore: | Alessandro Eros Piscioneri |
| Tipo: | Tesi di Master |
| Master in | 2nd Level Master in Industrial Automation |
| Anno: | 2013 |
| Docente/Relatore: | Carlo Ferraresi |
| Istituito da: | Politecnico di Torino |
| Lingua: | Inglese |
| Num. pagine: | 47 |
Forse potrebbe interessarti la tesi:
Mini-Robotic Applications for Miniaturized Assembly Tasks
FAQ
Come consultare una tesi
Il pagamento può essere effettuato tramite carta di credito/carta prepagata, PayPal, bonifico bancario.
Confermato il pagamento si potrà consultare i file esclusivamente in formato .PDF accedendo alla propria Home Personale. Si potrà quindi procedere a salvare o stampare il file.
Maggiori informazioni
Perché consultare una tesi?
- perché affronta un singolo argomento in modo sintetico e specifico come altri testi non fanno;
- perché è un lavoro originale che si basa su una ricerca bibliografica accurata;
- perché, a differenza di altri materiali che puoi reperire online, una tesi di laurea è stata verificata da un docente universitario e dalla commissione in sede d'esame. La nostra redazione inoltre controlla prima della pubblicazione la completezza dei materiali e, dal 2009, anche l'originalità della tesi attraverso il software antiplagio Compilatio.net.
Clausole di consultazione
- L'utilizzo della consultazione integrale della tesi da parte dell'Utente che ne acquista il diritto è da considerarsi esclusivamente privato.
- Nel caso in cui l’utente che consulta la tesi volesse citarne alcune parti, dovrà inserire correttamente la fonte, come si cita un qualsiasi altro testo di riferimento bibliografico.
- L'Utente è l'unico ed esclusivo responsabile del materiale di cui acquista il diritto alla consultazione. Si impegna a non divulgare a mezzo stampa, editoria in genere, televisione, radio, Internet e/o qualsiasi altro mezzo divulgativo esistente o che venisse inventato, il contenuto della tesi che consulta o stralci della medesima. Verrà perseguito legalmente nel caso di riproduzione totale e/o parziale su qualsiasi mezzo e/o su qualsiasi supporto, nel caso di divulgazione nonché nel caso di ricavo economico derivante dallo sfruttamento del diritto acquisito.
Vuoi tradurre questa tesi?
Per raggiungerlo, è fondamentale superare la barriera rappresentata dalla lingua. Ecco perché cerchiamo persone disponibili ad effettuare la traduzione delle tesi pubblicate nel nostro sito.
Per tradurre questa tesi clicca qui »
Scopri come funziona »
DUBBI? Contattaci
Contatta la redazione a
[email protected]
Parole chiave
Tesi correlate
Non hai trovato quello che cercavi?
Abbiamo più di 45.000 Tesi di Laurea: cerca nel nostro database
Oppure consulta la sezione dedicata ad appunti universitari selezionati e pubblicati dalla nostra redazione
Ottimizza la tua ricerca:
- individua con precisione le parole chiave specifiche della tua ricerca
- elimina i termini non significativi (aggettivi, articoli, avverbi...)
- se non hai risultati amplia la ricerca con termini via via più generici (ad esempio da "anziano oncologico" a "paziente oncologico")
- utilizza la ricerca avanzata
- utilizza gli operatori booleani (and, or, "")
Idee per la tesi?
Scopri le migliori tesi scelte da noi sugli argomenti recenti
Come si scrive una tesi di laurea?
A quale cattedra chiedere la tesi? Quale sarà il docente più disponibile? Quale l'argomento più interessante per me? ...e quale quello più interessante per il mondo del lavoro?
Scarica gratuitamente la nostra guida "Come si scrive una tesi di laurea" e iscriviti alla newsletter per ricevere consigli e materiale utile.
La tesi l'ho già scritta,
ora cosa ne faccio?
La tua tesi ti ha aiutato ad ottenere quel sudato titolo di studio, ma può darti molto di più: ti differenzia dai tuoi colleghi universitari, mostra i tuoi interessi ed è un lavoro di ricerca unico, che può essere utile anche ad altri.
Il nostro consiglio è di non sprecare tutto questo lavoro:
È ora di pubblicare la tesi
 Ricevi informazioni sui nostri servizi, sulle offerte e non perdere news e consigli su università e lavoro.
Ricevi informazioni sui nostri servizi, sulle offerte e non perdere news e consigli su università e lavoro.

